Radar Deep Learning bringt Fahrzeuge auf die Überholspur
Mit KI zu präziser Objekterkennung
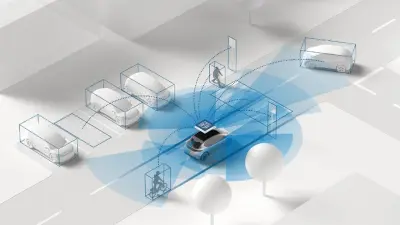
Automatisierte Fahrfunktionen machen den Straßenverkehr sicherer, flüssiger und für die Menschen komfortabler. Voraussetzung für das sichere Funktionieren fortgeschrittener Assistenzsysteme sind präzise Abbildungen der Fahrzeugumgebung. Sie setzen sich aus den Daten unterschiedlicher Sensoren am Fahrzeug zusammen. Stand der Technik ist dabei die Kombination der Wahrnehmungen von Radar-, Kamera- und optional Lidarsystemen.
„Radar-Sensorik in Fahrzeugen hat vielversprechende Systemvorteile“, sagt Michael Ulrich, der in der Bosch Forschung das Projekt AI-based Radar Perception leitet: „Die Radartechnik ist robust und zuverlässig, Radarsensoren sind relativ preiswert und gut verfügbar, und man kann sie einfach in Fahrzeuge integrieren, vorzugsweise an optisch unauffälligen Stellen.“ Allerdings bergen Radardaten gewisse Herausforderungen: Sie werden in der Regel als Wolke von Punkten dargestellt, die eine schlechte räumliche Auflösung hat. Radar basiert auf Funkwellen, die von Objekten reflektiert werden, und liefert Informationen über die Position und den Abstand des identifizierten Objekts.
Objekterkennung aus verschiedenen Quellen
„Im Vergleich zum Radar ist die Informationsdichte von Kameradaten zwar deutlich höher, doch liefern Kameras bei schlechten Sichtverhältnissen keine genügend sicheren Informationen. Wir brauchen also verschiedene, voneinander unabhängige Sensoren, um Objekte sicher zu identifizieren. Ziel unseres Forschungsprojekts ist daher, die Radar-Wahrnehmung mithilfe von Deep Learning so zu trainieren, dass die Objekterkennung signifikant besser wird“, beschreibt Michael Ulrich den Forschungsansatz seines Teams. Das interdisziplinäre Team besteht aus zehn Expertinnen und Experten der Bosch Forschung sowie Fachleuten aus dem Bosch-Geschäftsbereich Cross-Domain Computing Solutions, in dem automatisierte Fahrzeugsysteme entwickelt, industrialisiert und vermarktet werden. „Der interdisziplinäre Ansatz aus Praxis und Forschung hilft uns Forschenden sehr, uns auf praxisrelevante Fragestellungen und Lösungsansätze zu fokussieren“, sagt Ulrich, denn die Ergebnisse aus der Forschung stellen die Basis für künftige Produktentwicklungen dar.

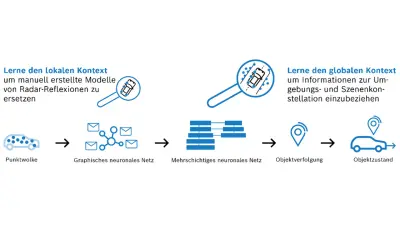
Die Teammitglieder aus der Bosch Forschung sind Expertinnen und Experten für Perzeption, Signalverarbeitung und maschinelles Lernen; sie verteilen sich auf Standorte in Deutschland, den USA und Israel. Der Ansatz des Deep Learning ist für Aufgaben wie Sprachverarbeitung und Bilderkennung heute am besten erforscht und wird vielfach in der Praxis angewandt. Das Forschungsprojekt wendet die Methode nun auf die Interpretation von Radardaten an. Deep Learning nutzt sogenannte neuronale Netzwerke, die zwischen ihrer Eingabe- und ihrer Ausgabeschicht eine umfangreiche innere Struktur aus Zwischenschichten ausbilden. Jede dieser Ebenen interpretiert aus den eingehenden Daten eine abstraktere Repräsentation. In der Ausgabeschicht werden die verarbeiteten Informationen zusammengeführt und ergeben das erkannte Objekt.
Trainingslager im neuronalen Netzwerk
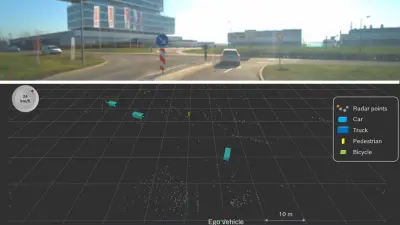
Neuronale Netzwerke werden mit sehr großen Datenmengen trainiert. Das Forschungsziel ist in diesem Fall, aus Radar-Punktwolken Objekte wie etwa Fahrzeuge oder Fußgänger und ihre Größe, Bewegungsrichtung und Geschwindigkeit zutreffend zu erkennen. Das Netzwerk lernt auf diese Weise aus einer großen Menge an Radar-Punktwolken und Objektdetektionen. Wie beim menschlichen Lernen tragen sowohl richtige als auch falsche Lösungen zum Erkenntnisfortschritt bei. Das gesammelte Wissen wird dann im Anwendungsfall für eine Fusionskomponente im realen Fahrzeug zur Verfügung stehen. Die Fusionskomponente hat die Aufgabe, die Daten der zahlreichen verschiedenen Sensoren zusammenzuführen und die Fahrzeugumgebung präzise abzubilden.
„Ein nächster Meilenstein unserer Perzeptionsforschung wird ein Foundation Model sein, das die unterschiedlichen Darstellungsweisen von Fahrzeugsensoren integriert“, wirft Michael Ulrich einen Blick voraus. Auf den menschlichen Alltag übertragen, könnte man sagen: Die Sensoren sprechen heute noch unterschiedliche Sprachen. Das gilt für Radarsensoren unterschiedlicher Ausführungen ebenso wie für die Gesamtheit der Sensoren in einem Fahrzeug. Ziel des Einsatzes eines Foundation Models ist, durch maschinelles Lernen in einem großen neuronalen Netzwerk gewissermaßen eine gemeinsame Sprache zu finden, in der sich die gesamte Sensorik verständigen kann. Außerdem soll der Deep-Learning-Prozess auf die Radar-Signalverarbeitung erweitert werden, um auch hier das volle Potenzial der Kombination von robuster Radar-Sensorik und künstlicher Intelligenz für automatisierte Fahraufgaben auszuschöpfen.